Linear Programming
Robust Motion and Pose Estimation using Linear Programming: Motion Estimation in real time from point-to-line correspondences using linear programming is presented. Point-to-line correspondences are the most reliable measurements for image motion given the aperture effect, and it is shown how they can approximate other motion measurements as well. An error measure for image alignment using the L1 metric and based on point-to-line correspondences achieves results which are more robust than those for the commonly used L2 metric. The L1 error measure is minimized using linear programming. The entire computation is performed in real-time on a PC (Pentium MMX 300Mhz) without special hardware. (With Shmuel Peleg and Michael Werman). [Project Page]
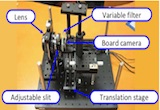
High-resolution Hyperspectral Imaging via Matrix Factorization: In this work, we introduce a simple new technique for reconstructing a very high-resolution hyperspectral image from two readily obtained measurements: A lower-resolution hyperspectral image and a high-resolution RGB image. Our approach is divided into two stages: We first apply an unmixing algorithm to the hyperspectral input, to estimate a basis representing reflectance spectra. We then use this representation in conjunction with the RGB input to produce the desired result. (With Rei Kawakami, John Wright, Yu-Wing Tai, Yasuyuki Matsushita, and Katsushi Ikeuchi). [Paper PDF]